Ay'ın Zorlu Arazisinde Hareket Edebilecek Küresel RoboTop Teknolojisi
Platformumuzdaki en çok okunan ve popüler makaleleri görmek için Trendler bölümüne geçebilirsiniz.
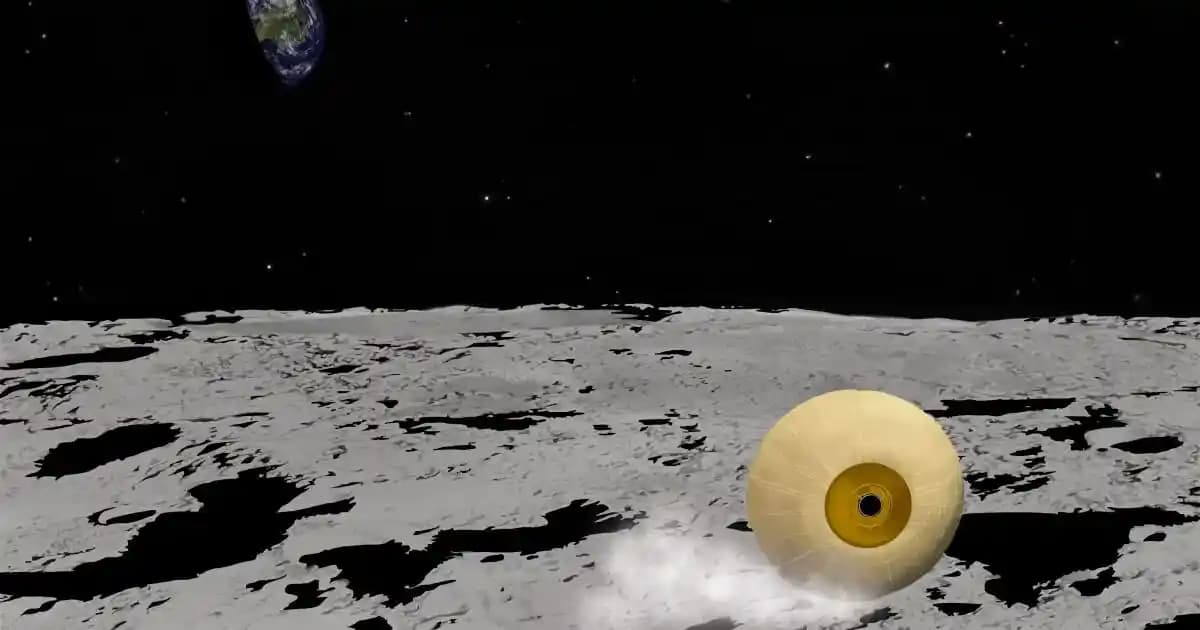
Texas A&M Üniversitesi araştırmacıları, Ay'ın en zorlu arazi koşullarında hareket edebilecek yeni bir mobil robot tasarlıyor. Bu robot, küresel bir yapıya sahip olup, yuvarlanarak hareket edebilen bir mekanizmaya dayanıyor. Tasarımda, robotun iç kısmında bulunan sarkaç sistemi sayesinde hareket kabiliyeti artırılıyor. Böylece, sadece yuvarlanmakla kalmayıp, çukurlardan veya engellerden sıçrayarak kurtulabilme potansiyeline sahip.
Küresel Robot Tasarımının Avantajları ve Zorlukları
Küresel robotlar, özellikle engebeli ve düzensiz yüzeylerde hareket etmek için geometrik olarak avantajlı olabilir. Ancak, tek temas noktası prensibi nedeniyle, robotun ağırlık merkezi her zaman temas noktasının üzerinde olmayabilir. Bu durum, robotun %90 civarında bir yüzeyde dengesiz olmasına yol açar. Özellikle kraterler, çukurlar ve geniş yarıklar gibi Ay yüzeyindeki doğal engellerde robotun takılma ihtimali yüksektir.
Ayrıca, Ay'ın düşük yerçekimi (Dünya'nın yaklaşık altıda biri) robotun hareketini etkiler. Düşük yerçekimi, eğimli yüzeylerde kontrollü iniş ve çıkışları zorlaştırır. Tekerlekli araçların bile %15'ten fazla eğimli yüzeylerde hareketi güçleşirken, küresel robotların bu tür zorluklarla başa çıkması mühendislik açısından karmaşık bir problem teşkil eder.
Ayrıca Bakınız







Hareket Mekanizması: Sarkacın Rolü
Robotun içindeki sarkaç sistemi, robotun hareketini sağlamak için temel bir bileşendir. Bu mekanizma, robotun yuvarlanmasını sağlayarak momentum oluşturur ve gerektiğinde robotun sıçrayarak engellerden kurtulmasına olanak tanır. Bu özellik, sadece yuvarlanmaya dayalı robotların karşılaştığı takılma problemlerine karşı bir çözüm sunar.
Sarkacın hareketi, robotun iç yapısının dinamik kontrolü ile sağlanır. Böylece, robotun ağırlık merkezi hareket ettirilerek denge sağlanmaya çalışılır. Ancak, bu sistemin etkinliği robotun çapına ve ağırlığına bağlıdır. Büyük çaplı robotlar daha fazla momentum kazanabilirken, küçük çaplı robotlarda bu etki sınırlı kalabilir.

Ay Yüzeyinde Araç Kullanımının Zorlukları
Ay'ın yüzeyi, kraterler, yarıklar ve düzensiz arazi yapısıyla bilinir. Bu nedenle, geleneksel tekerlekli araçların bile Ay yüzeyinde hareketi oldukça zordur. Gerçek dünya arazi koşullarında, golf arabası gibi hafif araçlar ancak nispeten düz alanlarda hareket edebilir. Ancak, gerçek ay yüzeyinde bulunan derin yarıklar ve engebeler, bu tür araçların ilerlemesini engeller.
Ayrıca, Ay'daki radyasyon seviyesi ve çevresel koşullar, uzun süreli yüzey keşiflerini zorlaştırır. İnsanların yüzeyde uzun süre kalması sağlık riskleri taşır. Bu yüzden, robotlar ve insansız araçlar, Ay yüzeyinde keşif ve örnek toplama görevlerinde öncelikli olarak kullanılmaktadır. İnsanlar ise genellikle yeraltı üslerinde bulunur ve sadece bakım veya örnek toplama için kısa süreli yüzey görevleri yapar.
Sonuç Değerlendirmesi
Küresel şekilli robotlar, Ay'ın zorlu arazi koşullarında hareket için yenilikçi bir yaklaşım sunar. Ancak, tek temas noktası, düşük yerçekimi ve engebeli yüzeyler gibi faktörler, bu teknolojinin pratikte karşılaşacağı önemli zorluklardır. Sarkacın sağladığı hareket kabiliyeti ve robotun çapı, bu zorlukların aşılmasında kritik rol oynar.
Ay yüzeyinde hareket için robotik çözümler geliştirilirken, mühendislik ve fiziksel sınırlamalar göz önünde bulundurulmalıdır. Bu tür robotlar, insansız keşif görevlerinde kullanılmak üzere optimize edilmelidir. İnsanlı görevlerde ise, yüzey hareketi yerine hava araçları veya yeraltı üsleri tercih edilecektir.
"Ay yüzeyinde araç kullanımı, sadece düz alanlarda değil, engebeli ve düşük yerçekimli ortamlarda da ciddi mühendislik zorlukları içerir. Küresel robotlar bu zorluklara karşı yeni çözümler sunabilir ancak tasarım ve uygulamada dikkatli değerlendirme gerektirir."